





關鍵詞 |
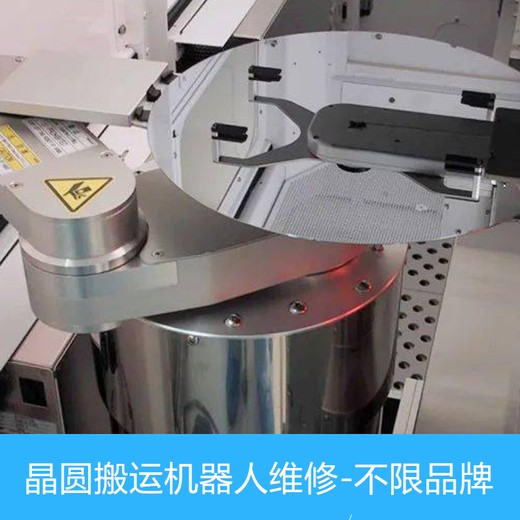
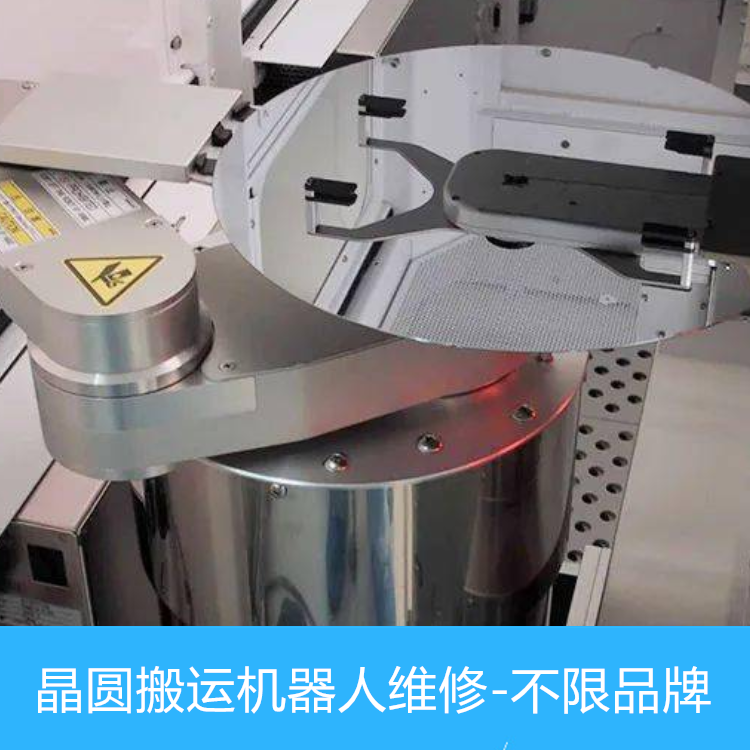
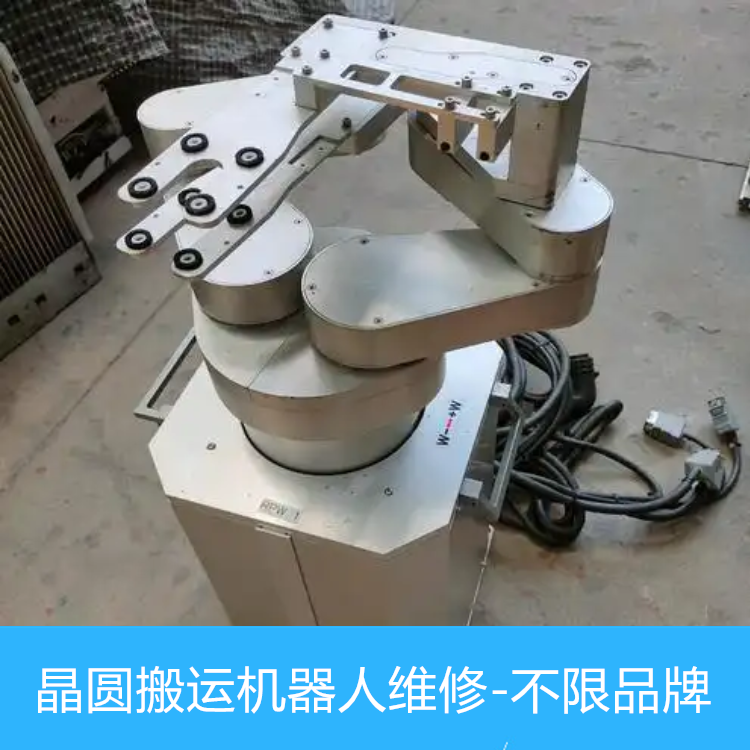
機器人維修,晶圓機器人維修,晶圓機械手維修,晶圓機械臂維修 |
面向地區(qū) |
材質 |
其它 |
|
品牌 |
其它 |
面向行業(yè) |
不限 |
型號 |
不限 |


————— 認證資質 —————
青島本地工業(yè)機器人維修熱銷信息













